




嫦娥四號兩器順利分離 玉兔二號在月背留下人類探測器的第一道印跡
文章來源:中國航天(tian)科技集團有限公司 發布時間:2020-01-04
嫦娥四號(hao)(hao)著陸(lu)器(qi)與巡視器(qi)已于2019年1月(yue)(yue)3日夜(ye)里順(shun)利分離(li),玉(yu)兔二號(hao)(hao)巡視器(qi)駛抵月(yue)(yue)球表(biao)面。著陸(lu)器(qi)上(shang)監視相機(ji)拍攝的玉(yu)兔二號(hao)(hao)在月(yue)(yue)背(bei)留(liu)下(xia)第(di)一道痕跡的影(ying)像圖,“鵲橋”中繼星順(shun)利傳回地(di)面。
1月3日(ri)嫦娥四(si)號探測器(qi)成功落(luo)月后(hou),科技人員按計(ji)劃開展了著陸(lu)器(qi)與巡視器(qi)分離(li)各項準(zhun)備工作,對“鵲橋”中(zhong)繼星(xing)狀態(tai)、著陸(lu)點環境(jing)參數、設(she)備狀態(tai)、太(tai)陽(yang)入射(she)角度等兩器(qi)分離(li)的實施條(tiao)件,進行了最終檢查確認。
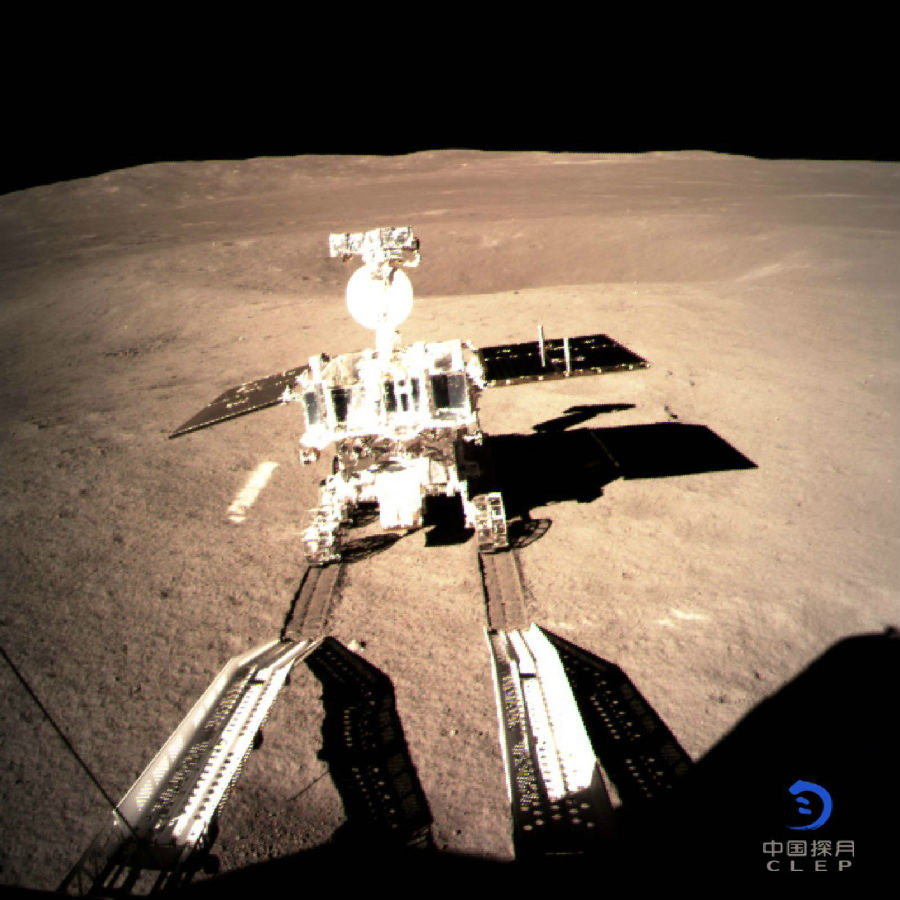
嫦(chang)娥四(si)號著陸器監視相機C拍攝的“玉兔(tu)二號”巡視器走(zou)上月面影(ying)像圖
1月(yue)(yue)(yue)3日15時07分(fen),科(ke)技人員在北京航(hang)天飛(fei)行控制中(zhong)心通(tong)過“鵲(que)橋”中(zhong)繼(ji)星向(xiang)(xiang)嫦娥四號(hao)探測器(qi)(qi)發送指令,兩器(qi)(qi)分(fen)離開(kai)(kai)始(shi)。嫦娥四號(hao)著(zhu)陸(lu)器(qi)(qi)矗(chu)立月(yue)(yue)(yue)面(mian)(mian),太(tai)陽翼呈(cheng)展開(kai)(kai)狀態。巡視器(qi)(qi)立于(yu)著(zhu)陸(lu)器(qi)(qi)頂(ding)部,展開(kai)(kai)太(tai)陽翼,伸(shen)出桅桿。隨后,巡視器(qi)(qi)開(kai)(kai)始(shi)向(xiang)(xiang)轉(zhuan)移(yi)機構(gou)緩慢移(yi)動。轉(zhuan)移(yi)機構(gou)正(zheng)常解鎖,在著(zhu)陸(lu)器(qi)(qi)與(yu)月(yue)(yue)(yue)面(mian)(mian)之間搭起(qi)一架(jia)斜梯,巡視器(qi)(qi)沿(yan)著(zhu)斜梯緩緩走向(xiang)(xiang)月(yue)(yue)(yue)面(mian)(mian)。22時22分(fen),巡視器(qi)(qi)踏上月(yue)(yue)(yue)球表面(mian)(mian)。
【責任編輯:王莉】
掃一掃在手機打開當前頁
